近年来,无人机群在监视、搜救、目标跟踪、损伤评估等领域得到了广泛的应用。无人机群由众多小型无人机组成,有望提供高度合作和智能化的作战。近十年来,人工智能的迅速发展为无人机群的智能协作提供了新的方法。然而,小型无人机有限的计算和存储能力已经不能满足资源密集型人工智能算法的要求。这成为制约无人机群智能化发展的瓶颈。
幸运的是,数字孪生(DT)作为用虚拟表示反映物理实体的关键技术之一,提供了最有前途的解决方案。在DT中,基于专家知识、物理模型、物理空间的历史和实时传感器数据,建立了高保真虚拟模型。网络空间整合了物理空间的多维数据,并进行建模和分析。DT为网络物理系统的构建提供了一种新的思路和实现途径。它构建了网络空间中物理实体的高保真数字孪生模型,并采用人工智能技术进行数据处理以获得全局最优解。我们将重点回答以下问题:
Q1:如何以高保真的方式有效地反映虚拟空间中的物理实体? Q2:如何充分利用DT在无人机群智能协同中的优势?
本文提出了一种基于DT的智能协作框架,以方便无人机群资源密集算法的实现。如图1所示,无人机群用于不同任务,如森林防火、交通管制、人群监控等。在智能中心(IC)建立了一个数字双模型,用于反映和监控物理实体(即无人机群)的整个生命周期。集成电路与高性能单元相结合,利用机器学习算法,在决策模型中探索了无人机群智能协作的全局最优解。

为了支持无人机群的智能协作,实时提供最优决策,提出了一种基于数字孪生的智能协作框架。无人机群的协同控制是一个复杂的问题,目标定位问题是NP难问题。机器学习算法可以提供高效的解决方案,但需要很高的计算和存储能力。这些算法不能直接应用于小型无人机。在这项工作中,我们介绍了一种新的基于数字孪生的智能协作框架,如图2所示。一般来说,框架由四部分组成:构成框架基础的物理实体;监控物理空间的数字模型;做出智能合作决策的决策模型;以及连接所有部分的连接。这四个部分相互协作,实时提供最佳决策。
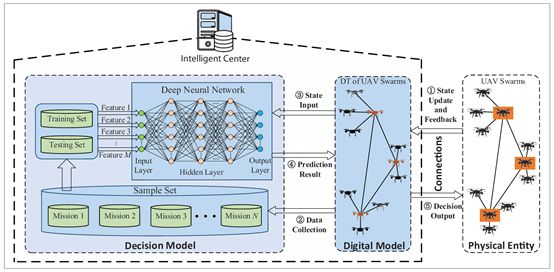
如图2所示,在决策模型中训练深度神经网络(DNN)以提供最优策略。无人机群在每一时刻的状态都是由位置、速度、能量、探测概率等特征决定的。首先,数字模型从物理实体获取环境状态信息,通过仿真和建模生成不同任务的样本数据集。在样本数据集中有足够的数据,我们训练了DNN模型。一旦训练,数字模型收集实时状态信息并抽象当前状态的特征。利用这些输入,DNN进行最优预测并输出到数字模型。接下来,数字模型分发最终决策以指导物理实体。最后,将不同时刻的状态信息和环境反馈收集到样本集进行进一步的训练。
在空战领域,时变环境对网络性能提出了特殊的要求,如低延迟、低带宽等。构建高度柔性作战单元及其相应武器系统之间的自组织网络具有重要意义。然而,受环境变化频繁的影响,在执行不同的作战任务时,固定的网络模式很难甚至不可能支持协同数据传输。
我们为时变战场提出了一种任务驱动型智能网络重建平台。该平台将任务分为具有不同特征的几种类型,并据此设计网络模式。在数字模型中,根据任务要求和在各种环境条件下的仿真结果,构建经验数据集。对于特定任务,可以使用机器学习算法获得最佳网络模式,包括介质访问控制(MAC),资源分配,数据路由和拓扑控制策略。然后,将决策释放到数据平面以用于物理实体的资源分配。执行战斗任务后,将分析网络性能并将其反馈给数字模型以更新样本数据集。
该智能协同框架可广泛应用于弹道设计、协同搜索、协同任务分配、协同编队控制等领域。下面,我们将介绍一个最具代表性的应用程序,即图3所示的协作搜索,以了解我们框架的好处。
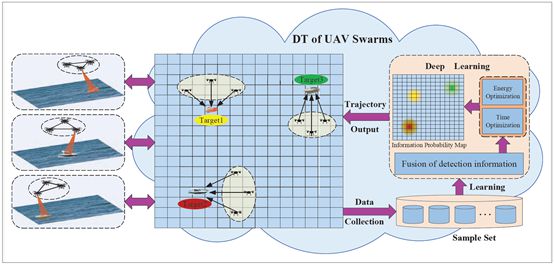
为了提供覆盖搜索区域的最优路径规划,协同搜索算法需要在无人机群中进行适当的在线资源分配。传统的分布式协同搜索策略依赖于局部状态信息,局部状态信息具有鲁棒性,但往往是局部最优的。此外,随着无人机数量的增加,协同搜索的难度呈几何级数增加。由于无人机的能量和计算量大,传统的算法无法提供最优策略。基于数字孪生模型的智能协作框架有效地将资源密集型操作转化为虚拟模型,为协作搜索提供了最优的解决方案。
飞思集群研发平台是飞思实验室专为无人系统集群协同研究而开发的研发平台。飞思集群研发平台一个可以在多种定位系统环境下(光学定位、UWB 定位、RTK 定位等)实现无人机、无人车或两者之间的集群控制平台。本平台支持多种定位系统和集群通信技术,在统一控制接口下实现无人机、无人车的按照规划路线运动,验证多机、多车编队和协同控制等算法的有效性。本实验平台可提供一套完整的集群控制开发、调试及验证环境。实验系统基于ROS/Matlab 开发,开放性强,用户不需要掌握太多的底层编程技术即可完成算法的修改和验证。为无人系统控制及多机集群控制等教学演示及二次开发提供核心设备支撑。
特别声明:以上内容(如有图片或视频亦包括在内)为自媒体平台“网易号”用户上传并发布,本平台仅提供信息存储服务。
许家印大消息!价值113亿元“恒大系”不良债权被摆上货架,抵押资PG电子游戏科技产简直离谱,甚至还有村里的地皮!涉北京等9城市12个项目
于东来:胖东来每周工作时间将不超过36小时,年休假将不低于40天,今年员工税后平均月收入九千元左右
视频 人社部:全面取消灵活就业人员在就业地参保的户籍限制,实施更加灵活的参保缴费方式
海信电视E8N Pro:618狂欢,Mini LED画质冠军等你来选!
be quiet! 德商德静界推出 Pure Power 13 M 金牌全模组电源


















