蜂群到底是什么东西? 简单来说,蜂群就是完全扁平的去中心化的网状结构,依靠点与点间的链 接,像波动一样迅速传导信息,而后数量集聚导致质变,涌现出极端一致的集 群特征。
听起来太难懂?举个例子,一群蚂蚁在搬回一小块苹果的时候,每只蚂蚁 都是独立行动的,它们并没有一个指挥者告诉它们该什么时候直行、什么时候 拐弯,每只蚂蚁都是独立的。他们不知道团队的情况,但是他们清楚地知道自 己附近的蚂蚁也在搬这块苹果,每只蚂蚁都是只知道自己的周边的情况,但这 足以使这个团体运作。同时,每只蚂蚁也不需要身份,没有个体特征,不需要 知道这只蚂蚁是张三,那只蚂蚁是李四,或者之前有过什么矛盾,对于“把苹
今后无人机也将朝着更智能的方向发展,各种传感器会变成空中机器人的 眼睛、耳朵、鼻子和手。这些传感器协调工作,组成一个闭环,对环境进行检 测、分析、决策,以此实现自我规划路径,同样也可以实现避障。
据雷锋网报道,Vijay Kumar 指出,这不只是简单的避障。在螺旋仪和加 速仪的配合下,无人机知道如何根据环境特征进行移动。通过每秒做数百次的 运算,计算出最可行的方位和速度。如图所示,传感器不同的等级、不同的不 确定性,我们都可以通过概率学的方法把系统的数据融合在一起,通过一个等
果块搬回巢穴”这个任务来说,身份只是冗余信息,对于完后该任务没有一点 用。更神奇的是,整个任务中,蚂蚁数量的增加和减少都不会改变这个任务的 完成度,甚至连队形和路线都不会改变。
群体行为的产生机制通常都是十分简单的,但是群体中单个个体行为会被 邻近的个体所影响,在没有集中控制的情况下,个体就可以通过局部简单的相 互交流,使得整体表现出诸如自组织、协作等一些较为复杂的群体行为,在复 杂性技术中,这种技术就叫做涌现。通过交互作用或协作行为,一些比较简单 的生物个体就能够体现出整体优势,完成较为复杂的任务,这给人类带来了许 多启发。
无人机的 5S 趋势 近日,Vijay Kumar 在雷锋网举办的 CCF-GAIR 全球人工智能与机器人峰 会上,分享了他对于空中机器人的看法,他认为空中机器人更多还是机器人的 属性,并且会朝着 5S(即 small 微型,safe 安全,smart 智能, speed 快 速,swarms 蜂群)方向发展。
但真正使用蜂群算法实现无人机协同飞行还是很困难的,PG电子游戏下载知乎用户吴易易 在回答“无人机编队飞行应用了哪些技术?实现有什么困难?”时指出:编队
飞行本质上是一个路径规划问题,你并不清楚自己在哪里,也不太清楚周围都 有啥,甚至都不知道你的伙伴都有谁。用比较专业的术语回答就是,首先,没 有足够可用的定位方法,无论相对的还是绝对的;其次,没有被透彻研究过的 动态避障问题;没有现成可用的通讯链路。
何况使用蜂群算法的无人机协同工作比编队飞行更难,因为编队飞行需要 注重飞行,但蜂群协同工作还需要完成任务,在完成任务的过程中,还会遇到 更多问题。
由于无人机使用蜂群算法进行协同工作有巨大的价值,目前很多高校实验 室、科技企业也在研究,新加坡新创科技公司 SwarmX 同样在从事蜂群无人机 的研究工作。日前,在深圳召开 2016 商业无人机论坛上,来自新加坡的 SwarmX 公司的 CEO Pulkit Jaiswal 在论坛上分享了他们关于蜂群无人机的坞 站,挪威总理还去他们公司参观过。
Vijay Kumar 提到,现阶段无人机的作用在行业应用和娱乐方面比较多, 但在未来,空中机器人的作用更多是用在搜索和营救方面,即使是军方也需要 小而隐秘的空中机器人搜集情报。所以无人机日后的一个发展方向应该是微小 型,如果体积太大,不利于对环境进行监测,也容易被敌人发现,还会降低其 灵活度。不过,体积缩小也会带来不便,当无人机直径缩小到 10 厘米时,它 就不能搭载过重的设备,也不能移动物品,只能作为前期勘探侦查使用。
根据 Vijay Kumar 的说法,无人机同样可以协同合作,完成单个无人机不 能完成的任务,尤其无人机体积变小后,不能负重,但是协同工作的话,就可 以更好的发挥微小型无人机的灵活性。
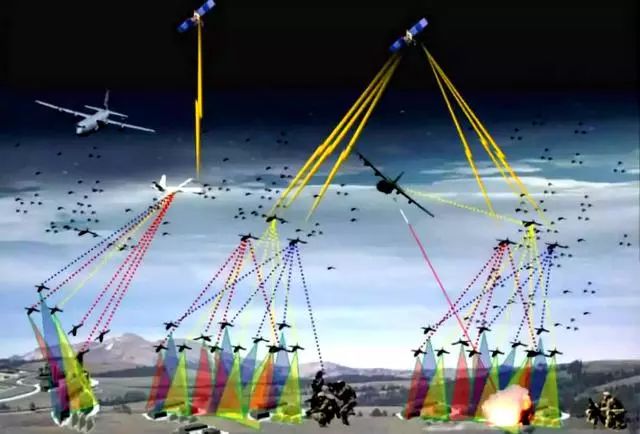
蜂群无人机的难度依然很大 无人机在实际飞行中如果存在突发状况,必须进行航迹重新规划,以以规 避威胁。为满足协同工作时的时效性,重新规划所采用的算法必须具有实时、 高效的特点。因此,可以根据蜂群算法领域搜索的特点,以参考航迹的突发威 胁作为领蜂航迹,跟随蜂仅在参考航迹的突发威胁段进行领域搜索,而不需要 对整条航迹进行搜索,由此可以快速获得修正航迹段,并替换原突发威胁航迹 段,整个飞行过程中,无人机根据获得的威胁信息,不断修正参考航迹,直至 达到目标节点。
在大疆引爆消费级无人机市场前,我们都认为无人机是军方那种高速、长 航时、昂贵又危险的武器。就在微小型四旋翼也被人们接受为无人机范畴时, 一位无人机领域的大神级别的人物仍然执拗的称自己研究的是空中机器人(飞 行机器人)。他就是宾夕法尼亚大学工程与应用科学学院院长、美国工程院院 士 Vijay Kumar。
而无人机带来的一系列安全问题,则是一直在强调的。不仅在操作时要注 意飞行安全,还要时刻对无人机下方的行人负责,虽然部分保险公司已经针对 飞手和第三方推出了意外险,但是我们还是应该尽力避免事后伤害。相较于体 积大的无人机,微小型无人机显然更安全,即使碰撞到路人,动能也更小,伤 害同样会更小。微小型无人机比大型无人机更能适应周遭的环境,由于体积 小,质量轻,相应的惯性也比较小,在发生意外情况的时候能被更好的控制, 甚至可以迅速的调整自我平衡。
根据目前的形势来看,蜂群算法在无人机的应用上还有相当大的进步空 间,这对于优化无人机航迹和提高无人机协同作战能力均有帮助。有志于在群 体无人机研究方面取得突破的企业可以试试该方向。
式来把它归纳成一个位置和速度的估算。但这个要达到一定灵敏度也仍是个挑 战。
此外,无人机在飞行过程中不仅需要可以判断其速度和位置,还需要加以 控制,避免走入障碍区。这就需要地图的识别技术了。
把群智能的思想应用到无人机中,可以对多无人机执行任务带来很多优 势。比如:群体包含的个体是完全分散式的,没有中心控制,较为容易和此时
的网络环境下的工作状况相匹配,不会因为单一个体或几个个体出现不确定的 状况而影响全局,因此,具有更强的鲁棒性;每个个体不能直接得到整体信 息,仅能感知部分信息,并有十分简单的单个自治个体规则,只需要最小智 能,具有简单性;群体中个体之间通过非直接通信相互合作。由于通过这种种 方式进行信息传输与交互,所以个体越多,通信消耗的增幅也就越大,这样的 系统具有更好的可拓展性;自组织能力,也就是说群体通过个体间简单的一些 行为就能够解决较为复杂的问题,执行较为复杂的任务。