一种基于多群体蚁群算法的多无人机协同目标搜索方法,包括对无人机的搜索环境进行建模;根据建模的环境,采用多群体蚁群协同算法进行多无人机的目标搜索。同一群体蚂蚁具有相互引导的作用,不同群体蚂蚁具有相互排斥的作用,既能增加解的多样性,增加多无人机之间的协同性,又能尽可能选择含有目标概率大的方向,避免贪婪式的选择,增加选择的多样性,还能发现某个目标后动态调整该目标的搜索收益,避免因目标期望因子的影响对目标的重复搜索,选择每代中的最佳路径进行信息素更新,促进算法向较优的路径靠拢。实现多架无人机搜索时无人机的路径协调,避免因信息素和目标启发因子的影响造成路径重叠过多,目标被重复搜索的现象,降低搜索代价,提高搜索效率。
本专利技术涉及一种多无人机协同目标搜索方法,特别是一种基于多群体蚁群算法的多无人机协同目标搜索方法。
无人机相关技术在民用和科研领域发挥着重要的作用,在空中视频拍摄、农林药物喷洒、区域地图测绘、高山地质勘查、高压线路巡检、山区快递运送、灾后抢险救援等领域应用越来越广泛。此外,在人工智能、电子通信技术、互联网、图像识别、传感器、物联网相互交叉融合的影响下,无人机已不仅限于单机飞行,多个无人机之间、多无人机与智能车之间建立起协同工作的无人控制系统,整个协同系统中,各无人机之间、无人机与智能车之间协同工作,自主执行决策,无需人工参与,提高了执行任务的效率,是现代化军事、农业、工业的重要发展方向。多无人机协同目标搜索是多无人机共同开展任务的一项重要内容,在范围很大的搜索区域内,任务重、时间紧的情况下,单个无人机显然无法快速完成搜索任务,而多个无人机同时展开搜索,就能高效的完成搜索任务,而且,当单个无人机执行任务时,无人机出现故障以及能源或电池供应不足时,整个搜索任务就停滞了。多个无人机执行任务时,其中一个出现上述现象时,对整个的搜索
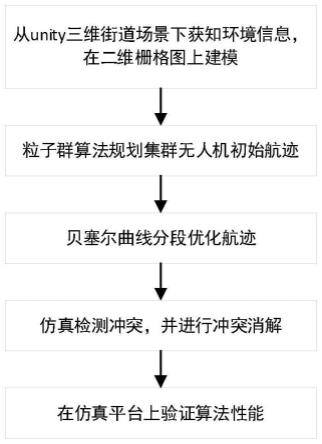
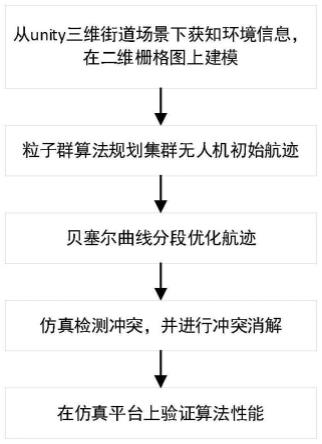
1.一种基于多群体蚁群算法的多无人机协同目标搜索方法,其特征在于包含以下步骤:(1)确定无人机飞行的环境,对无人机的目标搜索环境建模;(2)根据步骤(1)中的建模环境,采用多群体蚁群协同算法,确定各无人机协同寻找目标的最优路线。
1.一种基于多群体蚁群算法的多无人机协同目标搜索方法,其特征在于包含以下步骤:(1)确定无人机飞行的环境,对无人机的目标搜索环境建模;(2)根据步骤(1)中的建模环境,采用多群体蚁群协同算法,确定各无人机协同寻找目标的最优路线所述的一种基于多群体蚁群算法的多无人机目标搜索方法,其特征在于:所述搜索环境建模为地图的形式,同时把地图网格化,每个网格中有唯一的值与其相对应,用随机函数产生目标值,分布在网格中,无人机受转弯特性的影响在当前方向下,下一方向仅有直行、左前方、右前方3个可选择的方向,但在起步时有8个可选择的方向;在计算下一步网格的值时可以根据当前网格值和下一步的方向值唯一的确定下一步选择的网格。3.根据权利要求1所述的基于多群体蚁群算法的多无人机目标搜索方法,其特征在于:所述多群体蚁群协同算法包括以下步骤:1)在计算下一方向的选择概率时,融合进了自身蚁群群体的信息素、其它蚁群群体的信息素和目标收益的启发因子,其状态转移公式表达为:其中,allowed表示的是蚂蚁从网格i到下一网格j转移过程中,可选网格j的所有网格集合;表示t时刻网格j中信息素的残留量,表示信息素的相对重要程度;表示t时刻网格内关于目标信息的收益函数,表示收益的重要程度;如公式(2)所示,表示t时刻除了第k个群体外,其它S个群体在网格j残留信息素的均值,表示其它群体信息素的抑制作用,越大,相对抑制的作用就越强,通过这种抑制作用,可以避免其它群体的无人机对本群体已经搜索区域的重复搜索;2)在备选方向中选择下一网格时采用轮盘赌选择法,轮盘赌选择法与多群体蚁群算法相结合,在可行解的选择过程中,累积概率与随机数进行比较,将会以较大的概率选中备选解中所占比例较大的解,但不会直接选择备...
技术研发人员:陈立家张东明薛政钢汪晓群冯子凯赵成伟王敬飞袁蒙恩冯帅栋管禹赵瑞杰,PG电子手机版