由于航天领域的逐步发展和作战环境的日益复杂,多无人机协唰控制完成任务将会
成为今后高空作业的十分重要的发展方向,多架无人机如何能够合理的共同完成任务也
本文首先阐述了关于群体智能概念和优势,然后介绍了群体无人机的研究背景,研
究意义和蜂群算法的基本原理,本文旨在采用蜂群算法进行多无人机的任务规划,所以
首先验证了蜂群算法的优化效果,jffABC算法与BBOABC,BBODE,DE,PSO,GA
算法进行了比较,得出了一个关键参数的基本选择范围,再对几个函数进行优化,仿真
结果表明蜂群算法精度较高,是有效的和可行的,更适合针对应用于寻优设计,该算法
然后利用蜂群算法较好的优化性能去优化无人机的航路,分析和总结了无人机航迹
规划中所必需考虑的各种因素、研究对象和航迹规划常用的算法,着重阐述了环境模型
的建立、约束条件和航迹评价,用代价函数来评价航迹的可行性;并且分析了多个无人
机协同的意义、协同航迹的模型、IhR策略再将蜂群算法应用于航迹规划,给出了实验
的仿真结果,对蜂群算法应用于航迹规划进行了仿真,并且考虑从不同攻击方向进入的
效果,以及出现突发威胁时如何重新适时的规划航迹,结果表明蜂群算法能够很好地完
成协同航迹的规划;在飞行的整个过程中,所耗费的路径代价定义为协同函数,将每架
飞机抵达任务目标的时间范围通过协同函数来传达到,以这样的共享信息的方式达到整
体的协同。最终得到使多架飞机到达预定目标点,同时团队代价耗费最小,并且尽量让
单架无人机的个体代价也最小的路径。本文也对目标点的攻击方向进行了设定仿真。
最后研究了基于蜂群模型的群体无人机,考虑无人机群体的飞行控制,利用蜂群的
飞行机制中的四个规则及蜂群中蜜蜂分类的启发,规划模型,让空中的单个无人机通过
自组织的方法达到群聚智能飞行的目的,本文让引领机出发搜寻目标,然后根据具体情
况召唤在目的地的跟随机,通知需要多少跟随机共同去完成任务,最后又在始发地与重
点之间设置了若干障碍物,让无人机避开障碍,完成任务,这样节约了时问,保证群体
operationalenvironment,multi—UAVcomplete
areintroduced.Itisstudiedthatthemission
colonyalgorithm.First,theoptimization
andBBOABC、BBODE、DE、PSO、GA.weobtainedthe
aboutvariousfactorsmustbeconsidered、
construction,constraintcondition,routeevaluationand
coordinationvariableestimatedteamarrival
whichisselectedtriestoensuretheindividual
flight controlofmulti—UAVwhichis basedonbee
intelligent flight throughself-organization
mechanismandtheclassificationofbees.
taskthemunberofUAV.UAVtoavoidobstaclesand
colonyalgorithm;missionplanning;self-organization
无人机是一类无人驾驶的飞行器,它是在航空模型飞机的基础上演变而来的不载人
飞机,所利用的是无线电遥控装置和本身自带的程控设备。伴随着微机电、微电子、光
电子、隐身、通信与网络以及航空航天等高新技术的迅猛发展,无人机的技术发展和应
用也取得了很大的进步,逐渐获得了研究人员的的关注。为无人机平台技术的发展和应
用奠定了坚实的物质技术基础。近几年来,由于无人机在军事和民用方面有很大的潜力,
无人机引起了学术界的广泛的研究兴趣和关注。许多研究小组也由于各种研究目的,已
因为无人机重量轻、体积小,在执行任务的过程中机动性也很好、适应性很强、能
够很好的隐蔽并且不存在人身安全问题,更加适应恶劣的生存环境和完成一些“枯燥”
“高危”的工作。既可以减少参战人员的伤亡,又降低装备和使用成本,也逐步受到了
在越南实战中,无人机第一次充当了战争武器,美方也利用“QH一50”系列无人
直升机与“瑞安147”系列无人侦察机执行一些有关电子情报侦察的任务;在之后的海
湾、阿富汗、科索沃以及伊拉克战争中都使用过“捕食者”、“全球鹰”、“猎犬”、“龙
眼”等十几种无人机,而且有些也达到了无人机和战斗机的数据对接,在情报、侦察、
由于各种前沿技术的发展和武器的应用,无人机将面临更加恶劣的战场环境、愈发
艰难的作战任务、十分宽广的作战范围,这对传统的无人机控制技术提出了挑战。
自1991年,无人机在海湾战争中得到成功的运用以来,无人机的技术也较为成熟,
已有三十几个国家投入大量的人力财力进行无人机的研究和生产工作,无人机也在各个
领域中发挥了其重要且独特的作用,但随着作战范围的日益扩大,作战难度和任务复杂
程度的日益加强,一个无人机在执行任务就容易出现一些的问题,如单架无人机执行较
为繁重的任务时时间过长,也可能受到观察角度的限制遗漏,可能造成不能够全方位的
去监测侦察或者攻击目标;再有,万一单架无人机在飞行途中一旦出现问题,需要返航,
这将耽搁完成任务的时间进度,影响全局,在作战过程中甚至可能破坏整体工作计划。
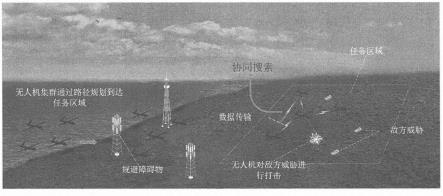
由于这些原因,研究员们投入了更大的精力在多无人机协同完成任务这一问题上,
多架共同执行任务的无人机构成了一个多无人机协同系统B1,通过利用生物群体的一些
在自然界中,我们经常可以见到各种牛物群体的有趣运动行为(如图1.5一图1.8),例
如蜜蜂筑巢、候鸟迁徙、鱼群游弋、鹿群逃避、蚁群觅食等,这种群体之间的协作行为
举例来讲,蚂蚁在觅食的过程中,能够通过信息素来调节各个无人机合理规划任务,
从而达到总代价最小;模拟鸟群的迁徙行为,让其保持队形、借力来节省能量、协同抵
抗天敌,这样就更好地发挥单个无人机的效能,提高无人完成任务的效率,便于执行一
群体行为的产生机制通常都是十分简单的,但是群体中单个个体行为会被邻近的个
体所影响,在没有集中控制的情况下,个体就可以通过局部简单的相互交流,使得整体
表现出诸如自组织、协作等一些较为复杂的群体行为,在复杂性技术中,这种现象就叫
做涌现(Emergence)。通过交互作用或协作行为,一些比较简单的生物个体就能够体现出
所以把群智能的思想应用到无人机中,可以对多无人机执行任务带来很多的优势。
(1)群体包含的个体是完全分散式的,没有中心控制,较为容易和此时网络环境下
的工作状况相匹配,不会因为尊一个体或几个个体出现不确定的状况而影响全局,因此
(2)每个个体不能直接得到整体信息,仪能感知部分信息,并有十分简单的单个自
(3)群体中个体之间通过非直接通信相互合作。由于通过这种方式进行信息的传输
与交互,所以个体越多,通信消耗的增幅也就越大,这样的系统具有更好的可扩展性。
(4)自组织能力。也就是说群体通过个体间简单的一些行为就能够解决较为复杂的
鉴于以上讨论,本文将多无人机执行任务的过程与群智能的思想相结合,H|]模拟蜜
现在各国也对无人机的研究越来越重视,也将较大的人力以及财力投入到了多无人
机协同控制理论的研究中,就是希望通过无人机的数据链进行相互通信,彼此协同,更
在围外,现在也已经展开了许多在多无人机协同控制领域的研究,其中具有代表性
的项目有美国围防部高级研究计划局(DARPA)研究的自治编队混合主动控制(Mixed
Automata--teams,MICA)项目[7 81欧洲EEC资助COMETS(Realtime
寻求一些新的方法去监视和控制目标,便于人可以更好地投入到整个战场的管理过程
中,让相对较少的工作人员就可以完成对较大型的无人机作战体系的指挥。COMETS主
要的研究是针对多类无人机的协同监视与检测系统,研究目标是为系统设计并且实现集
成分布式感知技术,实时图像处理能力和分布式控制结构,能够在森林火灾监视任务中,
演示验证系统的能力。这些项目研究了多无人机协同系统的资源处理、调整措施、操作
鹰”无人侦察机的基础卜,对多个无人机的协同侦察任务规划问题展开了许多的研究。
L.Ryan,T.GlennBaileyt“3在解决多无人机的协同侦察任务的问题时,将其抽象
成一个带时间窗的多旅行商问题,采用的算法是反射禁忌搜索算法。文中结合了无人机
各方面的约束,对目标进行优化,优化目标定义为基于无人机存活率的目标覆盖函数。
BaryR.Secrest“副把问题等化为一个TSP/司题,着重研究的是采用粒子群算法规划
此类问题。V.WilliamPorto”到把多UAV协同侦察完成任务抽象成为一个多TSP的问题,
G.Hutchison”刮也研究了多UAV协同侦察问题,它可描述为:给定一个圆
形的区域,将这个区域几等分,在整个圆形区域中随机分布一些任务目标点,让一个无
人机负责侦查其中的某一个部分的任务目标点,并将该问题建模为相互独立的多TSP问
题,采用了模拟退火算法,以最短路径长度做为优化的目标。这种方案只是将问题分解
简单化,抽象为多TSP问题,忽略了协同的本质,但是确实降低了问题的复杂程度,为
DarinT.Brown¨副把“捕食者”和“全球鹰”UAV作为背景,研究有关UAV的任务
航线规划问题(MissionRoutingProblem),把UAV航迹规划的任务问题抽象成为带路径长
度和时间窗约束的VRP模型,VRP模型中的一个车辆对应一架UAV,VRP模型中的顾客
对应所要侦察的任务目标,优化目标为最短航线距离,问题利用禁忌搜索算法进行解决。
BrianWhitetl61等人描述了无人机群的合作路径规划。解决的问题是无人机群同时到
达目的地,为此制定路径规划问题,产生可行(易于I{L行和安全)的路径。解决办法被分
为三步。第一步,产生易于飞行的路径,Dubins路径中的回旋曲线弧来为每个无人机产
生路径,这些路径是用不I司的几何准则产生的;第二步是增加些额外的限制来产生安全
的路径,为了不让无人机之间或者与环境中的已知障碍物碰撞,制订如下安全限制:(让
各路径)保持最小的分离距离;在同等长度上的这些路径不要交叉;飞跃中间的路点,
美军联合部队司令部通过“阿尔法计划”展开了关于UAV自主“集群”作战效能的研
究n71。通过仿真结果,把装有武器以及传感器的无人机群与现在存在的某个可执行单元
进行了对比分析。群体无人机不单歼灭了六几十个敌方目标同时还监测到91%的敌方军
队,但是单一的作战单元仅仅摧毁11个敌方目标和监测了不到33%的敌方部队。在霍普
金斯大学,应用物理实验室进一步地研究了该问题,并对“集群”单元应用于搜索地面
EugeneEdison等人研究了无人机的任务分配和路径规划问题,多无人机需要协作完
成各种任务,把无人机的运动规划建模为汽车模型问题,考虑每个车辆的最小转弯半径,
通过一个有限集合探视车辆的角度定义了一个目标,文中提出以图表的形式在任务分配
和路径优化的综合问题。这种新方法得到了次优的轨迹分配。为改善可探测角度的离散
化提出了一种改进方案,采用基因算法进行解空间的随机搜索。本文区分车组的组成两
种情况:同质化,即所有车辆是相同的:和异质性,车辆可能具有不同的作战能力和运
动约束。通过采样运行和蒙特卡罗模拟的研究论证遗传算法的性能。结果表明算法可以
高晓光P…,宋绍梅悼u等人采用层次分解策略建立了多uAv航迹规划系统结构,并
将多UAV的协同航迹规划进行了分解,共分为三层:协同管理层、路径规划层和轨迹
控制层。其中,l州司管理层丰要是起到协调的作用,即协调多UAV的攻击时机确定、
协同攻击航路选择、协同攻击代价以及性能:路径规划层要选择一条安全完成预定任务
的l{I行路径,能使UAV躲避敌方威胁,最终的规划结果用一系列航路点表示。规划的
依据是任务要求、威胁位置、燃料限制和UAV机动性能:轨迹控制层的作用是将各个
沈延航,周洲,祝小平¨刮研究了多兀人机搜索静止的多个目标问题。采用搜索理论,
依据“回报率”的状态图,展开了关于多UAV协同控制搜索理论的研究。并且利用蒙
特卡洛仿真,在理论最优的前提下,对协同搜索以及随机搜索都进行J,分析。实验结果
显示,协同搜索比随机搜索更具优势,能够更好地利用无人机的资源,提高群体的效能。
宋敏,魏瑞轩,冯志明研究的是不同类型无人机通过彼此的协同来完成对目标的侦
察、攻击和毁伤评估的任务,丰要是任务分配的问题,首先需要充分考虑不同UAV完
成任务方式的差异,将其建模为更加符合实际的异构多UAV任务分配模型;为了降低
模型求解难度,采用了有效的任务分层解耦方法,并运用一种自适应差分进化算法对该
问题进行求解。实验结果显示,采用此种方式可以使得异构多UAV的达到更好的协同
杨江华对未知环境下的多UAV任务白组织的蚁群算法进行了研究,着眼于未来战场
的作战趋势,未来提高兀人机自丰作战能力,本文以蚁群觅食行为作为模型,提出有效
解决该类问题的算法和分布式矢量化信息素结构,并提高了无人机整体性能的鲁棒性,
研究了就信息素视图方式的无人机协同方法,确实提高了作战效率,降低了通信时对整
丁琳,高晓光¨刈通过Voronoi图方法,引进协同变量以及协同函数,产生与预知威
胁相关联的航迹,使所有UAV可以一起到达任务目标,而且能通过集合点得出状态图,
如果在任务过程中出现突发威胁,相应的调整即时航迹,作战过程中的突发威胁实时进
柳长安,王和平,李为吉K…,左益宏B”等人对多uAv协同侦察航线规划问题进行了
研究,两个优化目标是:侦察到尽量多的目标和获得全部目标的有效侦察时问;按照这
两个要求,于是用有效侦察飞行时间来衡量航迹的优劣,表示UAV对任务目标总的监控
时间,文中假设各UAV的飞行都是相同的速率,所以将它的有效侦察飞行时间相应的转
化为在有此时间内uAV飞过的距离,即有效侦察飞行距离,用它来评价航迹的优劣,接
曹菊红,高晓光¨副设计了一种基于智能体技术的多UAVI力 同控制智能指挥系统,体
现了单个UAV的自主性,利用Agent的两种特性:自主性和交互性,通过专用通讯网络
郑昌文,丁明跃瞄…,李磊,徐帆江¨叫采用进化计算实现多UAV协调航迹规划。算法
中,不同的UAV潜存航迹形成各自的集合,并在集合内部进化,南个体的适应度函数来
实现飞行器之间的协调关系。采用特定的进化算子及染色体,可以让算法能够更好地利
严平,丁明跃,周成平,郑昌文研究了未知环境中的兀人机多任务航迹规划问题,
并利用l{【行路线图提出了一种多任务航迹规划框架,通过多任务结合动态航路设计,然
后在稀疏路线图和细致路线图上分别及时地寻得初始航路和启发式搜索备用航路,这样
在有新任务时可以实时地获得可行的初始航迹,并且在途中如果遭遇到临时威胁也可以
叶嫒媛”刈解决了多UCAV的任务规划问题,将它抽象成多目标的MILP问题模型,
将群智能理论应用到无人机协同控制方面的文章还很多,如蚁群算法。国防科学技
术大学,苏菲p到等人他们研究了有关无人机1力、同多任务分配的问题(CMTAP),采用的是
蚁群算法。在基本得CMTAP模型基础上,建立了一种扩展的协同多任务分配模型,全
方面地考虑了多类复杂约束条件,包括无人机任务能力的差别和动态任务时间约束,在
多子群蚁群算法的基础上,采用基于分工原则的蚁群算法,解决了CMTAP问题。根据多
任务协同分配的特点,设计了一种状态转移规则,是基于任务代价和任务能力评估问题
南京航空航天大学赵敏,姚敏p刮将无人机群作为一个整体的研究对象,因为要提高
效率、降低油耗,对任务和航线进行了综合规划。为了减少机群完成任务的时问和无人
机飞行的航程,提出了新的方法——一种肩发式的任务和轨迹综合规划方法。也为了能
减小机群完成任务的总时间,使各无人机的任务执行时间基本均衡,让同一无人机执行
蜂群算法(BeeColonyAlgorithm)是一种新颖的元启发式非数值优化计算方法,建立
在蜜蜂白组织机制和群体智能基础上的。蜂群算法的大体发展过程如下,最初,蜂群的
自组织模拟模型是1995年由Seely(”1最先提出的。在这个模型中,各个阶层的蜜蜂只负责
单一的任务,但是蜜蜂可以通过摇摆舞、气味等方式来进行多种信息的交流,进而使得
整个蜂群能够协完成多种工作,如收获花粉、构建蜂巢等。继而,在2003年,美国弗吉
D”叫提出了蜂群优化算法(beecolonyoptimization,BCO),2005
年,D.Karaboga又提出了更为系统的人工蜂群算法(artificial
法简单、鲁棒性强的优点,并将其应用于函数的数值优化问题上,在非限制性数值优化
函数上有着比常见的肩发式算法更加优越的个0t4-hH匕up”。D.Karaboga年IB.Basturk在2006年又
蜂群算法的分类是受到蜜蜂在自然界中的行为各有不同的肩发,BITAMS[391等人将
蜂群算法重点分为两大类,基于婚配行为与基于采蜜行为两类。而MAGDALENEM等
人H0’4”将蜂群算法分为基于交配和采蜜行为两类。由于蜜蜂的繁殖包括很多,如交配或
婚配、产卵和照顾幼蜂等一系列行为,所以采取了一种更为恰当的分类方法:将蜂群算
法主要分为基于繁殖原理和基于采蜜原理两大类。近些年来,这两大类,也被』。泛的地
较为常见的基于蜜蜂繁殖行为的蜂群算法,它是mAbbassH副于2001年提出的,称为