无人机(UAV)技术的发展使得无人机的市场需求急速上升。由于单个无人机的生存能力差,无法
完成复杂的任务,所以多以无人机群的形式协同完成任务。定位技术作为无人机技术中的关键技术,
引起了广泛关注。目前,多采用全球定位系统(GPS)对无人机进行定位。然而,仅采用GPS对无人机
进行定位存在着较大的误差,尤其是在高度的测量上;并且,GPS作为一种视距(LOS)技术,极易因
信号受到遮挡而导致无法定位。针对这一问题,西安电子科技大学的陈睿副教授团队联合新南威尔士
LocalizationforSwarmingAVs”的论文,首次提出了一种基于节点连通度的动态分方案,并首次提
出了一种适用于无人机群的内协作定位算法,最后提出了一种分缝合以及坐标转换方案。
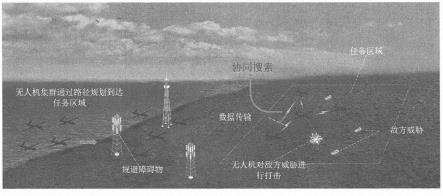
如图1所示,在无人机群中,部分无人机因信号遮挡或者其他原因,无法收到卫星信号,从而
无法通过搭载的GPS对自身进行定位。因此,需要通过其它无人机进行协同定位。
首先无人机群中的所有无人机均向邻居节点发送自己的序号(ID)以及连通度(DC)信息。其次,每
个无人机比较已知DC和接收到的DC,更新自己最大DC并向周围邻居节点发送该信息。等到消息
全部传输完成后,具有最大连通度的节点作为第一个头与其邻域共同构成第一个分。第二个头
所划分的分需要与第一个分有至少四个公共节点,并且为了提高网络划分的效率,避免划分多余
的分,第二个分能够包含尽可能多的未划入分簇的节点。最后,不断选取下一个簇头形成分簇,
直到无人机络中的所有无人机均被划分到相应的簇中。如图2所示,以一个十四个节点组成的平
当无人机络完成分簇后,分簇内的所有无人机之间相互测距测角,并将测量得到的距离和角度
发送给簇头无人机并计算向量矩阵。在稀疏连通的无人机络中,只有部分无人机之间的测距和测角
信息,那么簇头无人机将缺失元素置零,补全向量矩阵。通过SMDS算法计算分簇内每个无人机的
相对坐标,为了降低SMDS算法复杂度并确保实时精确定位,提出通过Nystrom近似分解子矩阵来
代替分解整个矩阵以及哥法求取前三个最大特征值和对应的特征向量来代替特征值分解,大大降低复
在计算得到各分簇无人机的相对坐标后,需要将各分簇进行缝合以得到全局坐标。利用第一分簇
的全局坐标。更新集合中无人机的全局坐标,按照该方法不断将分簇缝合,直到确定所有无人机的全
当所有分簇均缝合完毕后,我们就得到了整个无人机络的相对坐标,也即全局坐标。利用可用
的GPS坐标以及所有无人机的全局坐标,采用Procrustes分析算法进行坐标变换,即可得到无人机
的绝对坐标。为了满足三维空间中坐标转换条件,至少4架无人机GPS坐标可用。
①四种MDS算法定位误差与GPS配比关系:可以看出这四种基于MDS的定位算法均能有效
定位性能相当,且都明显优于MDS-MAP和MDS-MAP(P)算法,这说明引入角度信息能够进一步提
②四种MDS算法定位误差与通信范围关系:可以看出这四种算法的定位误差均随着通信半径的
增大而减小。SMDS-Ny和SMDS(P)-Ny-PM算法对通信半径的变化不太敏感。
2、成为VIP后,下载本文档将扣除1次下载权益。下载后,不支持退款、换文档。如有疑问加。
3、成为VIP后,您将拥有八大权益,权益包括:VIP文档下载权益、阅读免打扰、文档格式转换、高级专利检索、专属身份标志、高级客服、多端互通、版权登记。
4、VIP文档为合作方或网友上传,每下载1次, 网站将根据用户上传文档的质量评分、类型等,对文档贡献者给予高额补贴、流量扶持。如果你也想贡献VIP文档。上传文档
无人机空中展放导引绳技术协议 [无人机行业应用——空中表演 ].pdf
口译教学(广东外语外贸大学)figure interpretation口译数字专项练习.ppt
原创力文档创建于2008年,本站为文档C2C交易模式,即用户上传的文档直接分享给其他用户(可下载、阅读),本站只是中间服务平台,本站所有文档下载所得的收益归上传人所有。原创力文档是网络服务平台方,若您的权利被侵害,请发链接和相关诉求至 电线) ,上传者


















